
Note: This site is moving to KnowledgeJump.com. Please reset your bookmark.
Perceptual Control Theory (PCT)
In 1865, Claude Bernard noticed that the "constancy of the internal milieu was the essential condition to a free life." That is, we strive to maintain a set equilibrium. In 1932, Walter Cannon, a physiologist, was so impressed by the wisdom of the body's capability to guarantee with such efficiency the control of the physiological equilibrium, that he coined the word homeostasis (from the Greek words meaning "to remain the same."
However, at times we need to change to a different state according to our needs. This phenomenon is called rheostasis (Mrosovsky, 1990). When change occurs in the body, there are two ways that the body can respond.
Negative-feedback: the body responds in such a way as to reverse the direction of change. This is the type of response that is involved in maintaining constant conditions inside the body (homeostasis).
Positive-feedback: if a change occurs in some variable, the response is to change that variable even more in the same direction that results in a continuing spiral of change (rheostasis). Eventually, negative feedback may take over to put a limit on things.
For example, a toilet uses negative-feedback to fill itself up with water when flushed. A positive-feedback toilet is one that puts a stopper (clog) and thus overfills itself. Notice that a negative-feedback system uses a control device (the toilet's control device is the float) that tells it when homeostasis has been achieved. A positive-feedback system has no such control device -- it drives itself to the extreme (rheostasis).
Thus, all feedback must rely on negative-feedback, which is known as a "feedback control device," since the effect (feedback) of the environment on the device is controlled by the device itself. This "loop" makes it a circular causality in that it is NOT a one-way push-pull, rather it loops back onto itself -- the toilet's falling float causes the water valve to open, which in turn causes the float to rise with the water and shut itself off when the correct level of water has been reached.
Cybernetics
In 1943, physiologist Arturo Rosenblueth collaborated with MIT mathematician Norbert Wiener and engineer Julian Bielow to create an influential paper, Behavior, Purpose, and Teleology (1943), in which they establish a clear link between animate behavior and that of feedback-control systems. In addition, they maintained that purposeful behavior (either human or machine), did not require the teleological assumption of a future cause having a present effect. Rather purposeful behavior was a circular causation. Going one step more, Wiener published a ground breaking book, "Cybernetics" (1948), that continued the application of feedback to living organisms.
Note: Cybernetics roughly translates from its Greek origin as steermanships — steering a ship on course to a desired destination.
Perceptual Control Theory
In 1960, electrical engineer William Powers, physicist Robert Clark, and clinical psychologist Robert Mcfarland published a two-part article titled, A General Feedback Theory of Human Behavior. In 1973, Powers published the first book on cybernetics and control-system concepts to human behavior -- Behavior: The Control of Perception. It had three important contributions (Cziko, 2000): First, to fully appreciate the implications that cybernetics had for the behavioral sciences. We are living networks of negative-feedback-control systems and behave as we do to control our perceptions. This is a direct reversal that our perceptions of the environment controls our behavior. Thus we do NOT operate on a one-way cause and effect, rather we vary our behavior to control perceived environmental consequences of those behaviors.
Secondly, our control system originates within us. Thus leading to the second contribution of Powers — a hierarchical organization of control systems in which each level of the hierarchy controls a different class of perception. There are 11 classes that represent progressively more abstract aspects of the external environment:
Intensity of environmental input
Sensations (such as a colors)
Configurations (combinations of sensations)
Transitions (temporal changes in configurations)
Events (sequences of changing configurations)
Relationships (logical, statistical, or causal co-variation between independent events)
Categories (class membership)
Sequences (unique orderings of lower order perceptions)
Programs (if- then contingencies between lower level perceptions)
Principles (a general rule that exists in the behavior of lower level perceptions)
System concepts (a particular set of principles exemplified by the states of many lower level perceptions)
Powers' third contribution were several demonstrations of PCT. Thus, he simply did not give us a model, but provided several means to show that it is in fact way more than a theory.
Behaviorism and PCT
Behaviorists stick with the simple case-and effect notion that has little to do with the realities of life. This cause-effect notion of behavior is simply backwards. What we perceive does not control us. It is our reference levels that originate within us that control our perceptions. Unlike non-living control systems, such as homing devices, cruise control systems, and thermostats that are controlled by the environment, a living system is controlled from within itself.
While the goal of behaviorism was to make psychology "scientific," it fails as it can only describe one of more "subjectively" selected tasks. For example, if someone is walking down the street, a behaviorist can describe the time it takes to get from point A to point B, or describe how the legs propel that person. Yet, it is not always clear as to why that person is walking down the street. This is because a behavior can have several uncontrolled side effects. Objective observation and measurement does not tell us that of the many side effects that ones behavior has on the environment, exactly which one is being controlled by the reference level, and therefore, matters to the individual. For example, while we might eventually see that she went to buy a newspaper, it still might not be the final goal as there is a hierarchy of control systems, e.g., such as wanting to check the latest stock prices in order to accumulate wealth in order to retire.
Powers performed a number of demonstrations to show how PCT worked. I think the most interesting one is the rubber-band demonstration. You loop two rubber bands together so you have a knot in the middle. Then you put a coin on a table and get someone to hold one end of the linked bands while you hold the other. Your job is to maintain the position of the knot above the coin while the other person randomly adjusts the amount of tension that she is pulling on her end. As she pulls harder, the knot shoots away from the coin toward her, but then you pull harder, and the knot moves back to hover above the coin. If she relaxes her pull, the knot moves towards you, but having gotten the hang of the task, you've already relaxed also, and the knot remains almost stationary over the coin.
A behaviorist or casual observer might conclude that it is a stimulus-response action — you are simply responding to the movement of the other person's hand. However, this is simply a behavioral illusion. For if you put a large book or a piece of cardboard in the way so that you cannot see the other person's hand, you will still have no problem in keeping the knot over the coin. This is because you are responding not to the environment, but rather to a reference system within you.
Comparing the demonstration with the PCT model (see diagram below) that goes something like this:
The other person is the environmental disturbance (12).
You keep the knot above the coin by looking at the controlled variable (1).
The eyes are the sensors (2) that provide a perceptual signal (3) to the comparator (4).
This compares the perceived position of the knot with the reference signal (5) provided by the purpose (6).
The error signal (7) indicates the discrepancy between the intended perception and is sent to the effector (8) that causes muscle contractions to increase or decrease tension on your end of the rubber bands.
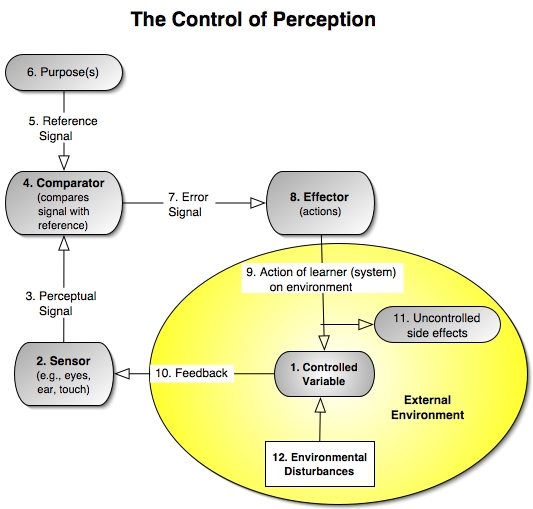
Note the causal looping — changes in the position of the knot lead to movements of your hands that simultaneously lead to changes in the position of the knot (perception to action and then back to perception).
For more demonstrations, see: http://faculty.ed.uiuc.edu/g-cziko/twd/demos.html
References
Bernard, C. (1865). Introduction to Experimental Medicine (cited in Cziko, 2000)
Cziko, G. (2000). The Things We Do. Cambridge, Massachusetts: The MIT Press. (free download - http://faculty.ed.uiuc.edu/g-cziko/twd/pdf/index.html)
Mrosovsky, N. (1990). Rheostasis: The Physiology of Change. New York: Oxford University Press.